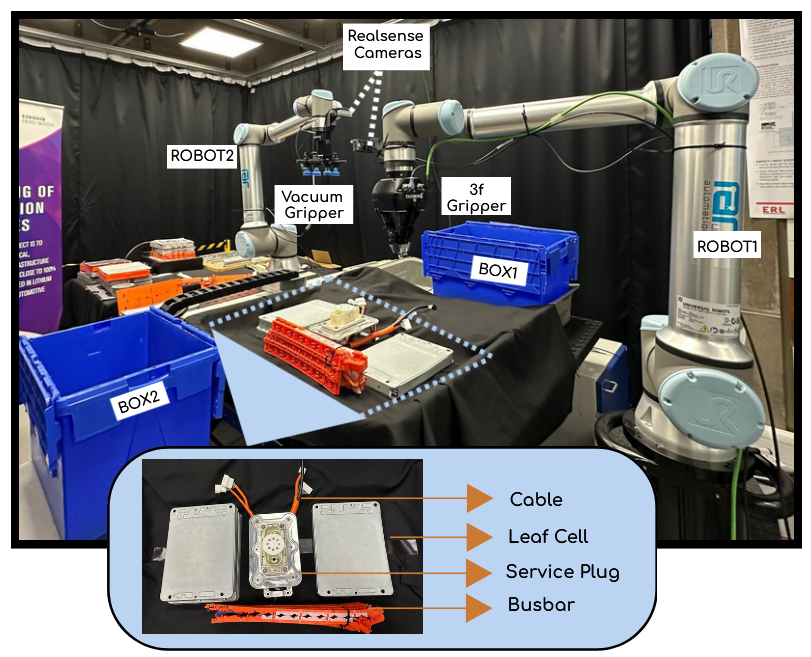
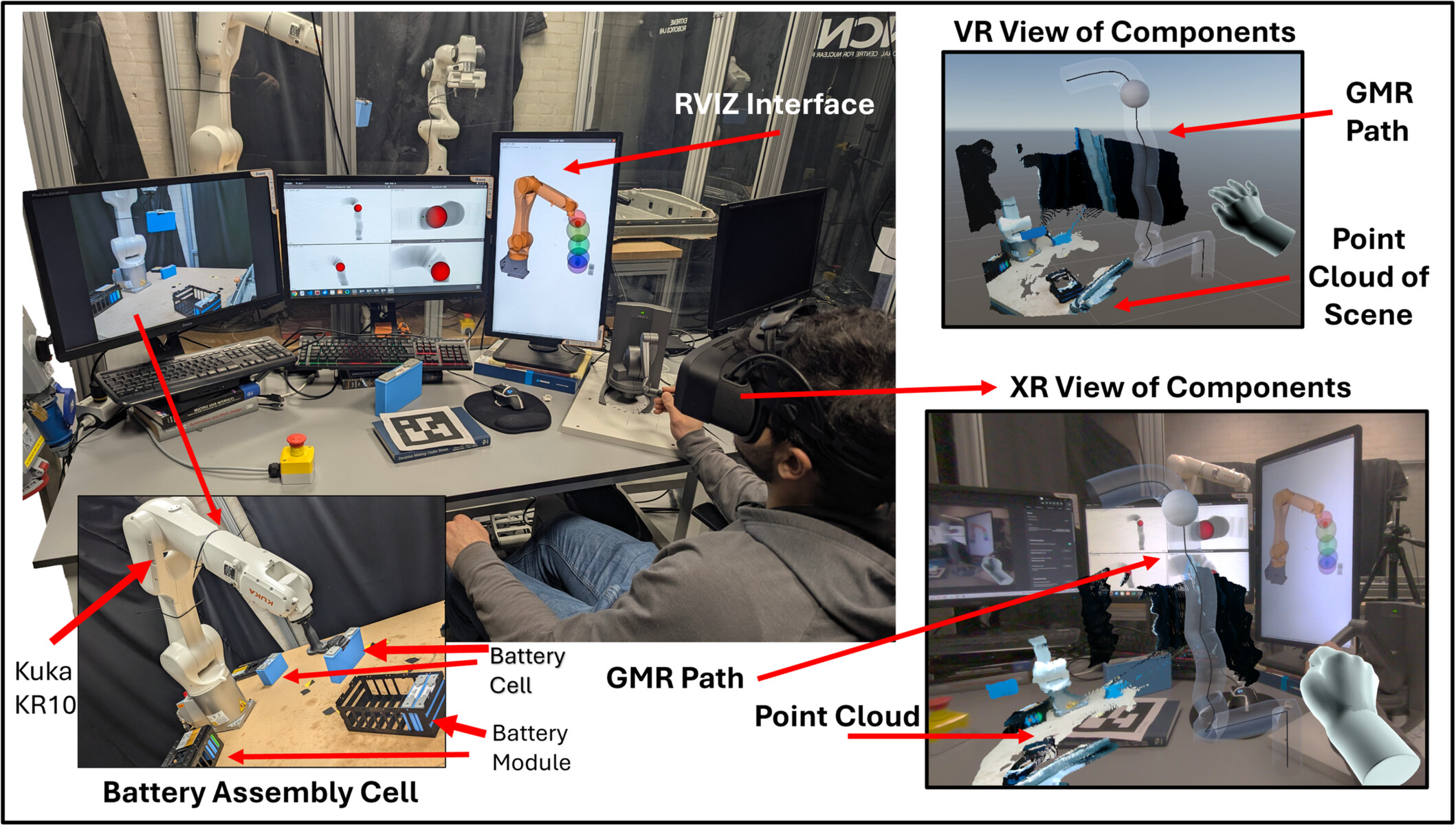
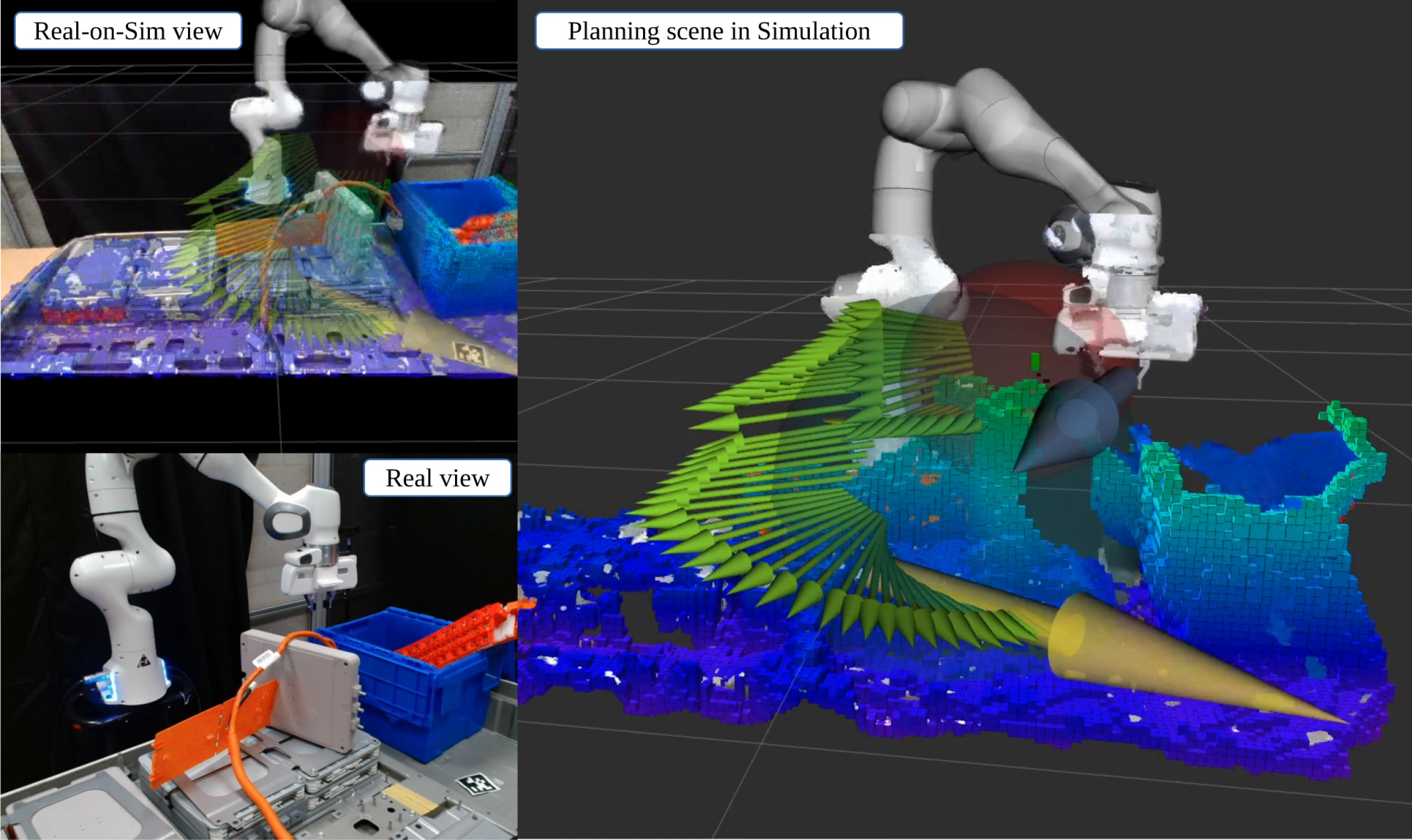
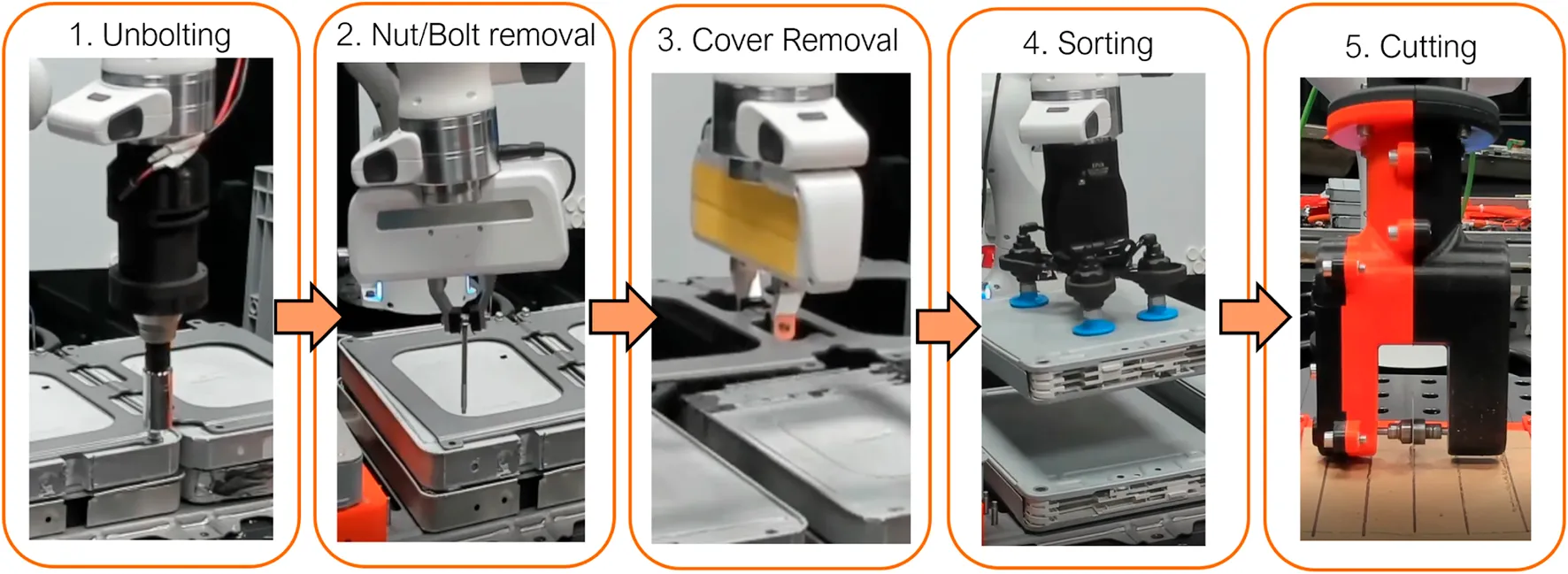
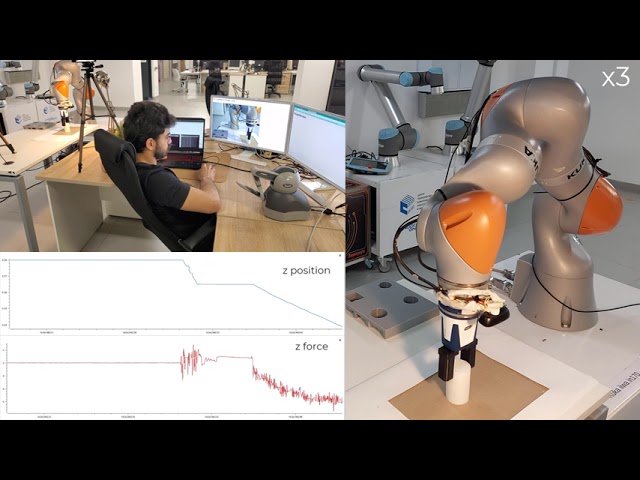
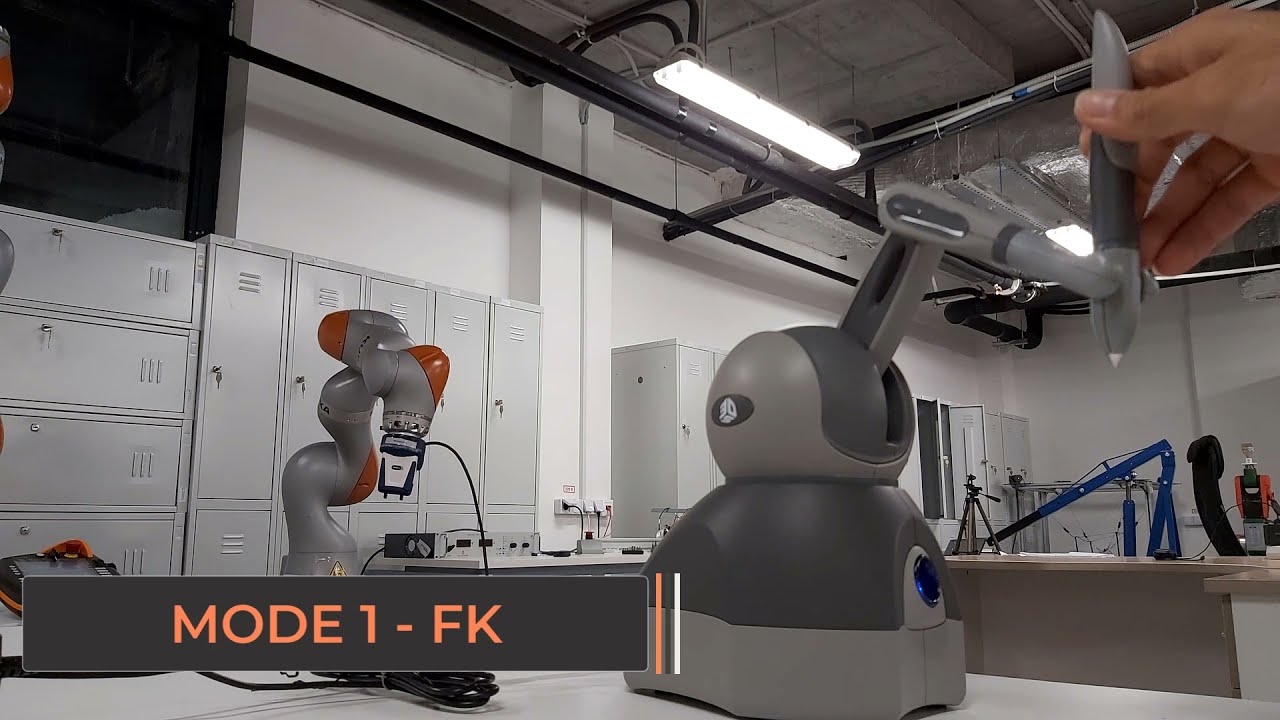
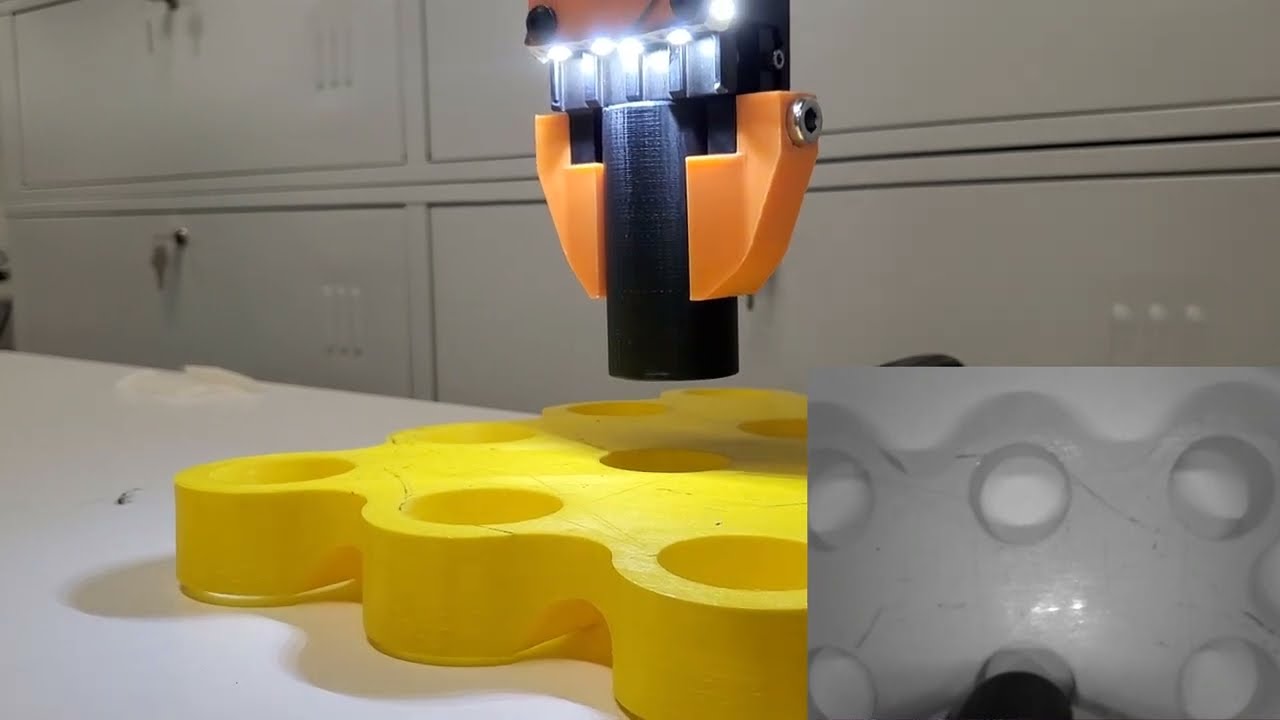
Research Multi-Robot Task and Motion Planning A Task and Motion Planning (TAMP) framework for multi-robot EV battery disassembly, combining symbolic task planning, vision-based perception, and learned motion generation. Haptic Teleoperation in XR A teleoperation framework for EV battery cell handling, integrating haptic feedback, extended reality (XR) visualization, and adaptive trajectory generation. Task-Parameterized Motion Planner Efficient motion planning for robotic manipulation in constrained environments using GMM-Informed RRT planners. Tele-robotics for Disassembly A comparative study of telerobotic systems for the disassembly of electric vehicle batteries, focusing on the impact of haptic feedback on task performance. Master's Master's Thesis Comparative analysis of a Peg-In-Hole Internship Bilateral Tele-operation of Kuka Iiwa via Touch haptic device Lab project Tele-operating a Cable-driven robot via Touch haptic device Object detection Peg-in-Hole task using sensor-fusion F/T sensors and 2D camera image Bachelor's VET-ENG Erasmus +KA2 VET-ENG project. Bachelor's Thesis Tele-operation of a custom-made 7DOF from a VR scene