Multi-Robot Task and Motion Planning
A Task and Motion Planning (TAMP) framework for multi-robot EV battery disassembly, combining symbolic task planning, vision-based perception, and learned motion generation.
This work introduces a four-layer task-and-motion planning (TAMP) framework to enable precise and efficient multi-robot coordination for electric-vehicle (EV) battery disassembly. The system is designed to handle cluttered and dynamic environments by integrating symbolic task planning with a motion planner guided by demonstrations (TP-GMM).
Real-time component localization is achieved using stereo vision with YOLOv8, while a combination of OctoMap-based 3D mapping and the Flexible Collision Library (FCL) in MoveIt ensures robust collision avoidance. This unifies predictive digital-twin collision checking with reactive, vision-based safety measures.
Publication
This research has been submitted for publication. Pending decision!
TAMP Framework and Results
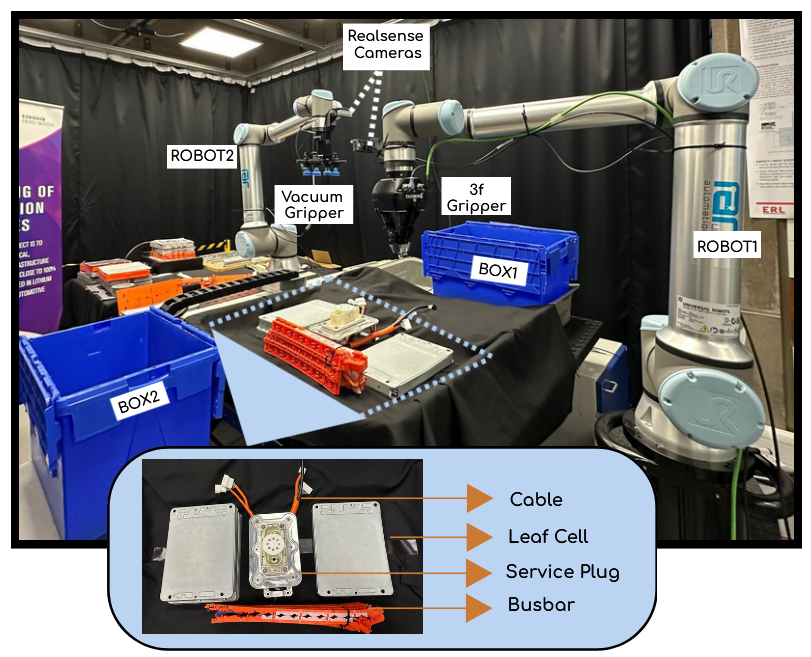
The framework was validated on a system with two UR10e robots performing various disassembly tasks, including cable, busbar, service plug, and leaf-cell removals. The performance of the proposed approach was compared against a default RRTConnect baseline.
The results demonstrated significant improvements in motion efficiency and safety. The average end-effector path length was reduced by 63.3%, and the makespan (total time) decreased by 8.1%. Furthermore, the swept volumes of the robot arms were substantially smaller, and the mutual overlap between the robots’ workspaces decreased by 47%.
These findings highlight the framework’s ability to produce more compact, safer, and more efficient motions, advancing the autonomy and precision of multi-robot systems for EV battery disassembly in unstructured environments.
Video Demonstration
Please watch the video for the full demonstration ![]()