Tele-robotics for Disassembly
A comparative study of telerobotic systems for the disassembly of electric vehicle batteries, focusing on the impact of haptic feedback on task performance.
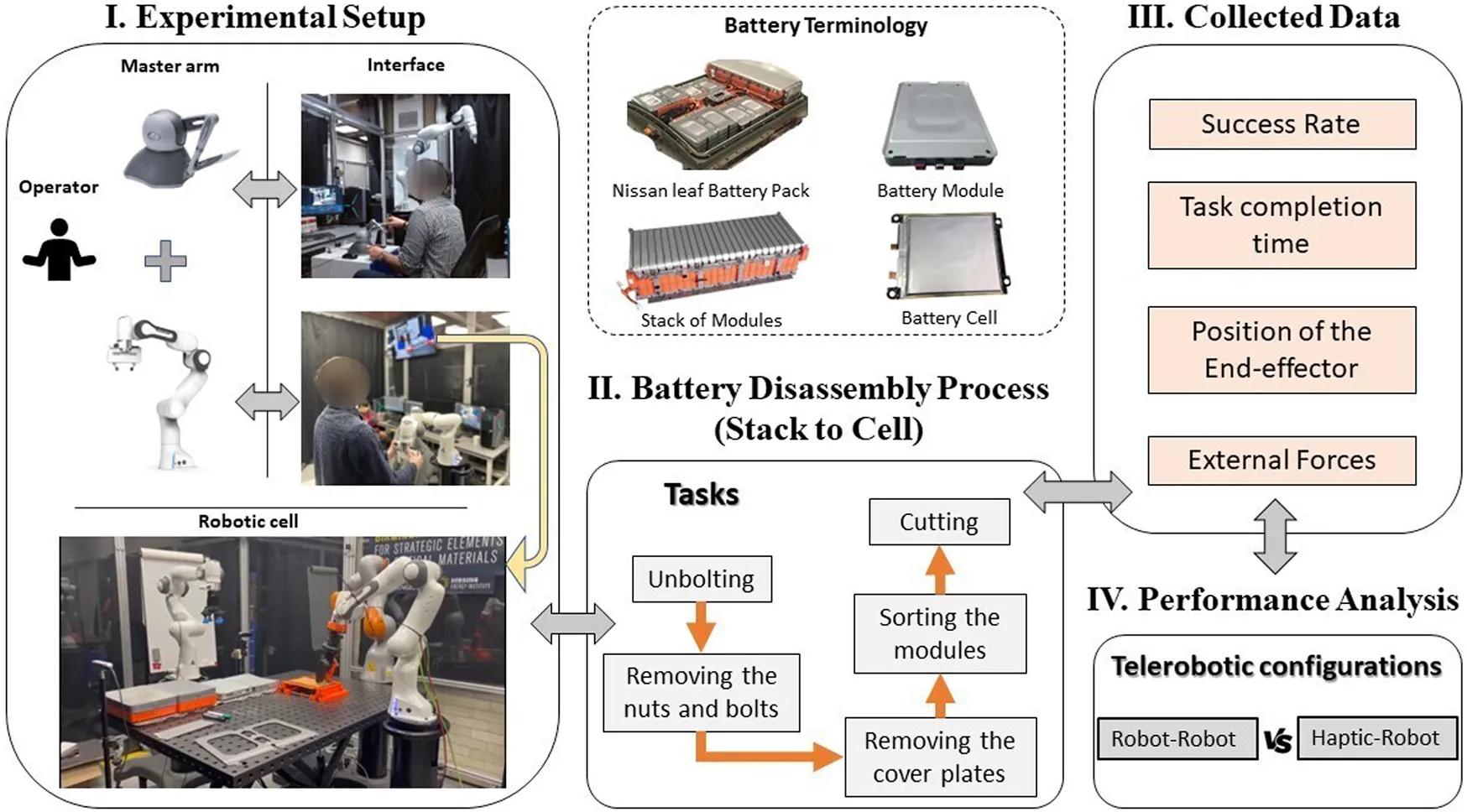
This research investigates the use of telerobotics for the disassembly of electric vehicle (EV) batteries, a critical step for recycling and reusing valuable materials. The work addresses the challenges of battery disassembly, such as design complexity and safety concerns, by exploring semi-autonomous robotic solutions.
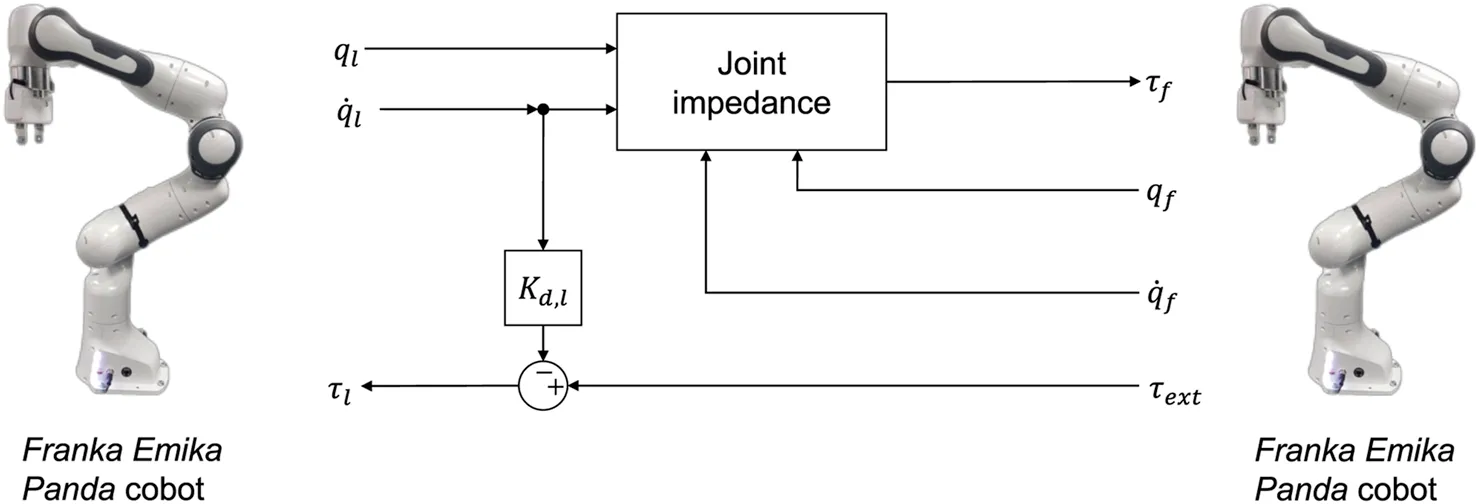
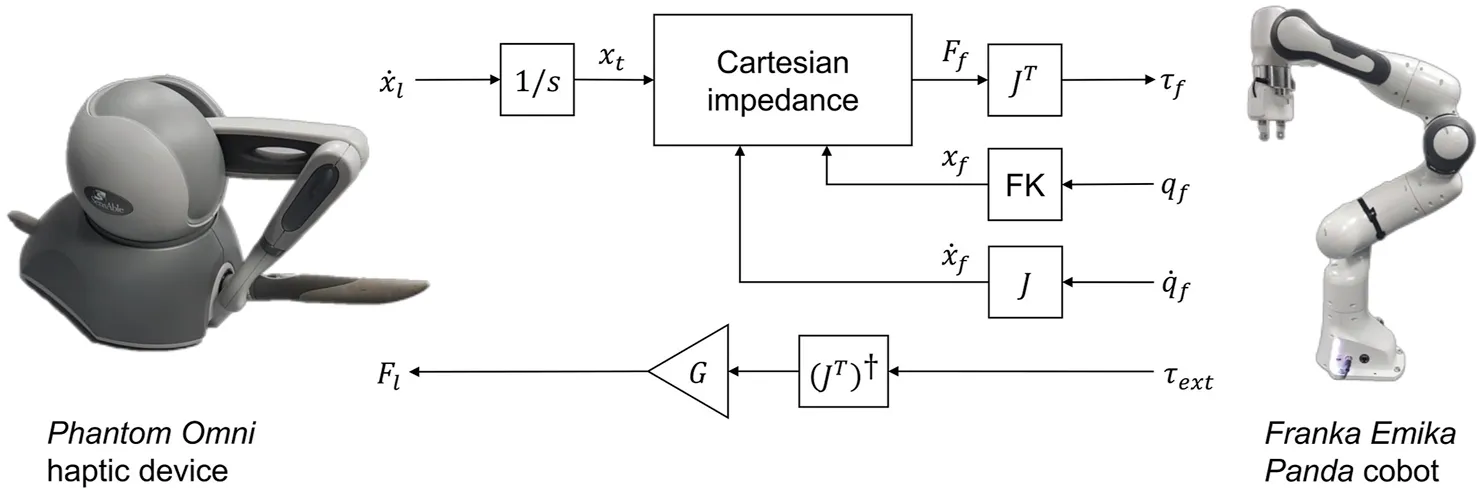
A comparative study was conducted between two haptic telerobotic frameworks: a traditional asymmetric master-slave setup and a system with identical master and slave cobots. The disassembly of a Nissan Leaf 2011 module stack was used as a benchmark to evaluate the systems based on task completion time and success rate.
Publication
The findings of this study have been published in Frontiers in Robotics and AI. The full article can be accessed through the link below:
Comparative Study
The study revealed that using identical cobots for master and slave devices resulted in a significant time reduction of 22%–57% for various disassembly tasks. This improvement was primarily attributed to the expanded workspace and 1:1 positional mapping.
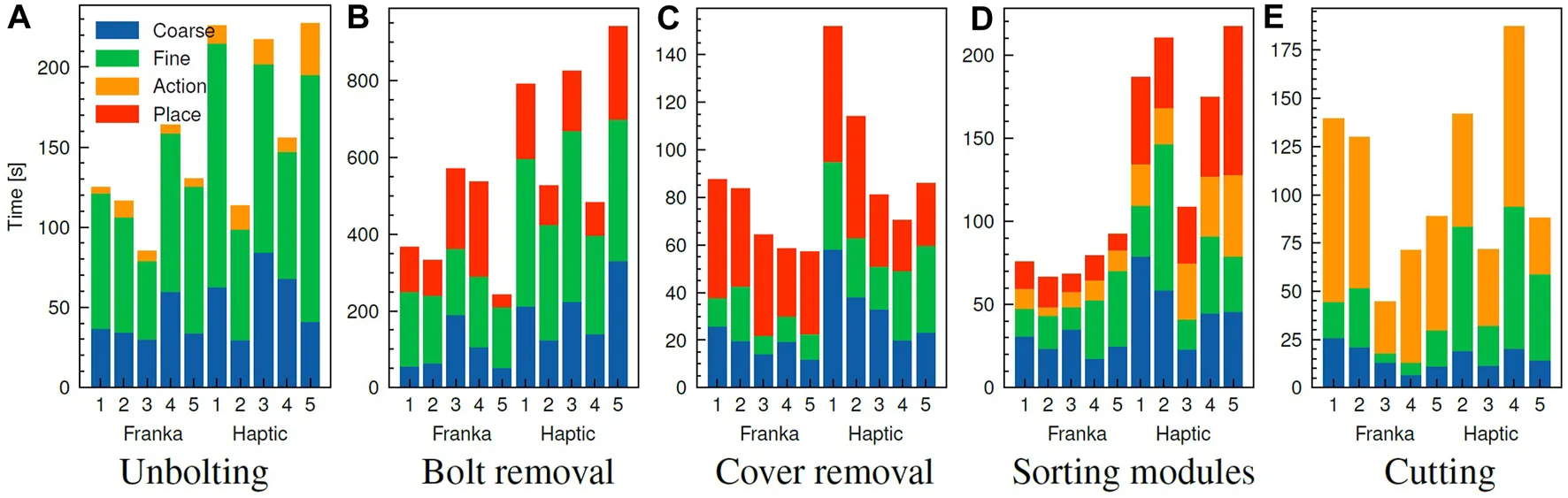
However, this configuration also led to a 10%–30% decrease in the first-attempt success rate. The research found that for tasks like unbolting and grasping, the realism of force feedback was less critical than the directional information. In contrast, for vacuum pick-and-place and contact cutting tasks, 1:1 force mapping provided stronger tactile cues from the environment, improving performance.
These results highlight the trade-offs between different telerobotic setups and provide valuable insights for designing effective systems for complex manipulation tasks in hazardous environments.
Experiments Demonstration
Please watch the video of the experiments recorded for different disassembly processes ![]()